Spike
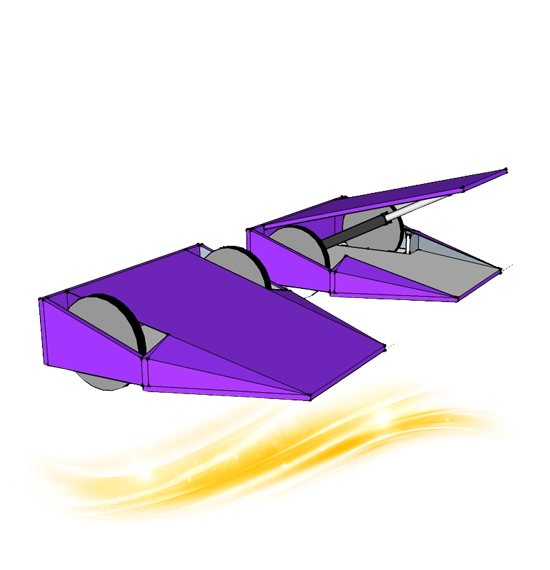
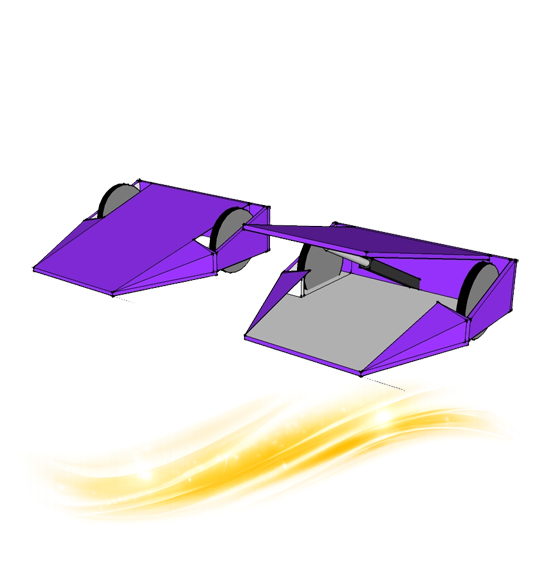
Designed as a simple and safe introduction to combat robotics, Spike was built as a flipper robot with a strong focus on reliability, control and ease of use. It followed a classic wedge-style layout, a design I’ve always appreciated for its simplicity and effectiveness in controlling engagements.
The robot was constructed around an aluminium base chassis, providing a solid and dependable foundation. This was paired with a 5mm HDPE wedge and additional HDPE armour, offering a good balance between protection and weight while keeping the overall structure durable enough for repeated impacts.
At its core, Spike used a linear actuator-driven flipper system, chosen specifically for its safety and straightforward operation. While this setup limited the speed and power of the weapon compared to more advanced pneumatic or high-powered systems, it delivered a controlled and consistent lifting action that suited the robot’s purpose.
Both the drive and weapon systems were relatively slow, a trade-off that made the robot more predictable and easier to handle. This was especially important as Spike was built as a shared project with my daughter, allowing her to be involved in the build and driving while keeping the design safe and manageable.
Built around a traditional wedge concept with a controlled flipper system, Spike focused on learning, accessibility and enjoyment, while still applying the core principles of robot combat design.
![]()
Flipper
![]()
3S LiHV 800mAh
![]()
2 Wheel Drive
![]()
HDPE & Aluminium